 咨詢電話:18128028677
咨詢電話:18128028677
咨詢電話:18128028677 產(chǎn)品列表PRODUCTS LIST
隨著低空經(jīng)濟(jì)從 “概念" 走向 “落地",無人機(jī)已深度融入物流、植保、應(yīng)急救援等民生場(chǎng)景。但低空環(huán)境的復(fù)雜性 —— 樓宇間的 “穿堂風(fēng)"、山區(qū)的突發(fā)陣風(fēng)、農(nóng)田的亂流 —— 成為無人機(jī)安全飛行的最大變量。據(jù)行業(yè)統(tǒng)計(jì),超 40% 的無人機(jī)飛行故障與風(fēng)場(chǎng)應(yīng)對(duì)能力不足直接相關(guān)。作為無人機(jī)安全性能的 “終ji檢驗(yàn)場(chǎng)",無人機(jī)測(cè)試實(shí)驗(yàn)室正迫切需要一款能精準(zhǔn)復(fù)刻真實(shí)風(fēng)境的核心設(shè)備,而無人機(jī)測(cè)試風(fēng)墻正是填補(bǔ)這一需求的關(guān)鍵載體,它以 “墻式" 立體風(fēng)場(chǎng)模擬能力,讓實(shí)驗(yàn)室測(cè)試更貼近實(shí)際飛行場(chǎng)景,為無人機(jī)安全出廠筑起第一道防線。由Delta德爾塔儀器聯(lián)合電子科技大學(xué)(深圳)高等研究院——深思實(shí)驗(yàn)室團(tuán)隊(duì)、工信部電子五所賽寶低空通航實(shí)驗(yàn)室研發(fā)制造的無人機(jī)抗風(fēng)試驗(yàn)風(fēng)墻\可移動(dòng)風(fēng)場(chǎng)模擬裝置\風(fēng)墻裝置,正成為解決無人機(jī)行業(yè)抗風(fēng)性能測(cè)試難題的突破性技術(shù)。
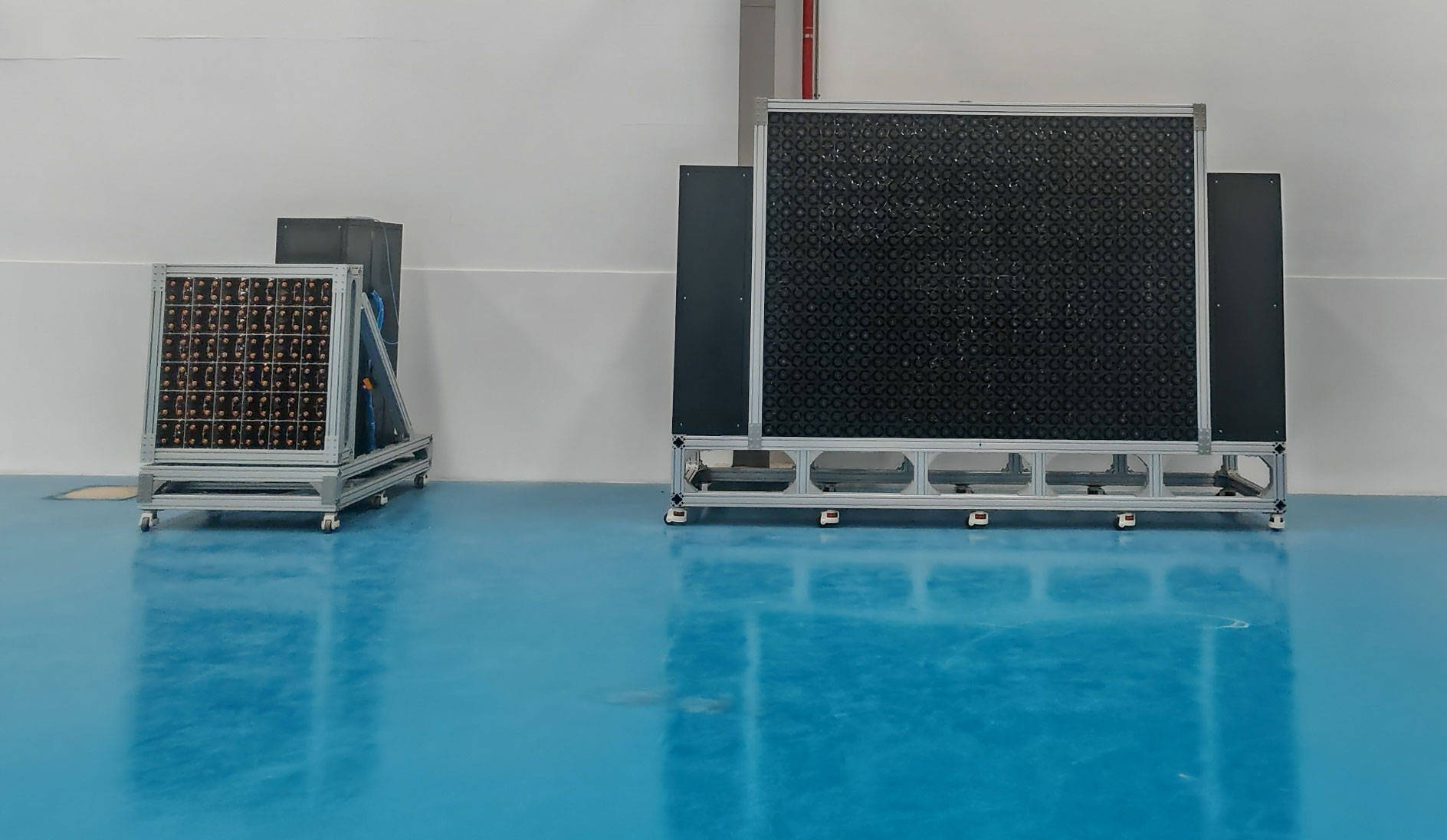

無人機(jī)風(fēng)墻測(cè)試系統(tǒng)\無人機(jī)抗風(fēng)試驗(yàn)風(fēng)墻\可移動(dòng)風(fēng)場(chǎng)模擬裝置\風(fēng)墻裝置
一、告別 “單一風(fēng)場(chǎng)":測(cè)試風(fēng)墻的場(chǎng)景化革新
傳統(tǒng)風(fēng)洞設(shè)備多以 “單向氣流" 模擬風(fēng)場(chǎng),難以復(fù)現(xiàn)低空環(huán)境中 “多方向、多強(qiáng)度、動(dòng)態(tài)變化" 的復(fù)雜風(fēng)況。無人機(jī)測(cè)試風(fēng)墻則通過結(jié)構(gòu)與技術(shù)創(chuàng)新,實(shí)現(xiàn)了從 “平面風(fēng)場(chǎng)" 到 “立體風(fēng)境" 的跨越,che底革新實(shí)驗(yàn)室測(cè)試模式。
立體風(fēng)場(chǎng)覆蓋全維度:測(cè)試風(fēng)墻采用矩陣式風(fēng)機(jī)陣列設(shè)計(jì),可構(gòu)建 0.5-50 米高度的立體風(fēng)場(chǎng)空間,既能模擬貼近地面的 “貼地風(fēng)"(如農(nóng)田植保時(shí)的近地亂流),也能還原高空的 “側(cè)向風(fēng)"(如物流無人機(jī)在樓宇間的斜向氣流),覆蓋無人機(jī)常見飛行高度的全維度風(fēng)況。
分區(qū)控風(fēng)模擬局部風(fēng)境:風(fēng)墻可將整體風(fēng)場(chǎng)劃分為多個(gè)獨(dú)立控制區(qū)域,例如左側(cè)區(qū)域模擬 8m/s 的正向風(fēng),右側(cè)區(qū)域模擬 5m/s 的側(cè)向風(fēng),中間區(qū)域疊加 2m/s 的湍流 —— 這種 “分區(qū)控風(fēng)" 能力,能精準(zhǔn)復(fù)現(xiàn)城市樓宇間 “局部亂流疊加" 的真實(shí)場(chǎng)景,讓測(cè)試數(shù)據(jù)更具參考價(jià)值。
動(dòng)態(tài)風(fēng)場(chǎng)還原突發(fā)情況:設(shè)備支持 “風(fēng)速 - 風(fēng)向" 動(dòng)態(tài)聯(lián)動(dòng)調(diào)整,響應(yīng)時(shí)間≤8 秒,可模擬 “陣風(fēng)突襲"(風(fēng)速?gòu)?3m/s 瞬間升至 12m/s)、“風(fēng)向驟轉(zhuǎn)"(風(fēng)向從 0° 快速偏轉(zhuǎn) 90°)等極duan風(fēng)況,有效檢驗(yàn)無人機(jī)的應(yīng)急姿態(tài)調(diào)整能力,避免因 “突發(fā)風(fēng)況" 導(dǎo)致的飛行事故。
二、技術(shù)內(nèi)核:讓 “風(fēng)境" 復(fù)刻更精準(zhǔn)、更可控
無人機(jī)測(cè)試風(fēng)墻的核心價(jià)值,在于以技術(shù)手段 “還原真實(shí)、控制變量",讓實(shí)驗(yàn)室測(cè)試既能復(fù)現(xiàn)復(fù)雜風(fēng)場(chǎng),又能精準(zhǔn)控制測(cè)試條件,為無人機(jī)性能優(yōu)化提供可靠數(shù)據(jù)支撐。
高精度參數(shù)控制:風(fēng)墻配備進(jìn)口風(fēng)速傳感器與閉環(huán)控制系統(tǒng),風(fēng)速控制精度可達(dá) ±0.2m/s,風(fēng)向控制精度 ±2°,能穩(wěn)定輸出從 0.5m/s(微風(fēng))到 20m/s(強(qiáng)風(fēng))的全范圍風(fēng)速,滿足不同類型無人機(jī)的抗風(fēng)測(cè)試需求 —— 從消費(fèi)級(jí)無人機(jī)(抗風(fēng)≤6m/s)到工業(yè)級(jí)無人機(jī)(抗風(fēng)≤15m/s),均可找到適配的測(cè)試參數(shù)。
數(shù)據(jù)聯(lián)動(dòng)實(shí)現(xiàn) “風(fēng) - 機(jī)" 協(xié)同:設(shè)備可與無人機(jī)飛控系統(tǒng)、姿態(tài)記錄儀、載荷監(jiān)測(cè)儀實(shí)現(xiàn)實(shí)時(shí)數(shù)據(jù)聯(lián)動(dòng),測(cè)試時(shí)既能記錄風(fēng)場(chǎng)參數(shù)(風(fēng)速、風(fēng)向、湍流強(qiáng)度),也能同步采集無人機(jī)的姿態(tài)數(shù)據(jù)(俯仰角、滾轉(zhuǎn)角、高度偏差),形成 “風(fēng)場(chǎng)輸入 - 無人機(jī)響應(yīng)" 的完整數(shù)據(jù)鏈,幫助研發(fā)人員精準(zhǔn)定位性能短板。
低干擾設(shè)計(jì)保障測(cè)試純凈度:針對(duì)搭載精密設(shè)備的無人機(jī)(如測(cè)繪無人機(jī)、醫(yī)療物資運(yùn)輸無人機(jī)),風(fēng)墻采用低電磁干擾風(fēng)機(jī)與消音外殼,運(yùn)行時(shí)電磁輻射≤50dBμV/m,噪音≤55 分貝,避免對(duì)無人機(jī)的通訊、導(dǎo)航、傳感器部件造成干擾,確保測(cè)試數(shù)據(jù)的真實(shí)性。
三、實(shí)驗(yàn)室建設(shè)的 “核心支撐":從測(cè)試到產(chǎn)業(yè)的全鏈條賦能
對(duì)無人機(jī)測(cè)試實(shí)驗(yàn)室而言,無人機(jī)測(cè)試風(fēng)墻并非 “可選設(shè)備",而是支撐實(shí)驗(yàn)室功能落地、對(duì)接產(chǎn)業(yè)需求的 “剛需核心",其價(jià)值貫穿無人機(jī)研發(fā)、認(rèn)證、應(yīng)用全鏈條。
研發(fā)端:加速性能優(yōu)化:在無人機(jī)原型機(jī)研發(fā)階段,實(shí)驗(yàn)室可通過測(cè)試風(fēng)墻模擬不同應(yīng)用場(chǎng)景的風(fēng)場(chǎng) —— 例如為植保無人機(jī)模擬農(nóng)田 “高低錯(cuò)落作物間的亂流",為應(yīng)急救援無人機(jī)模擬山區(qū) “陣風(fēng)疊加地形風(fēng)",提前發(fā)現(xiàn)機(jī)身結(jié)構(gòu)、動(dòng)力系統(tǒng)、飛控算法的不足,縮短研發(fā)周期 30% 以上。
認(rèn)證端:對(duì)接標(biāo)準(zhǔn)要求:當(dāng)前國(guó)內(nèi)外已明確無人機(jī)抗風(fēng)性能認(rèn)證標(biāo)準(zhǔn)(如我國(guó)《民用無人駕駛航空器系統(tǒng)安全要求》),測(cè)試風(fēng)墻可精準(zhǔn)復(fù)現(xiàn)標(biāo)準(zhǔn)中規(guī)定的 “額定抗風(fēng)風(fēng)速"“陣風(fēng)耐受度" 等測(cè)試條件,為無人機(jī)提供符合認(rèn)證要求的第三方測(cè)試報(bào)告,幫助企業(yè)快速通過適航認(rèn)證,打通上市通道。
應(yīng)用端:降低試錯(cuò)成本:對(duì)無人機(jī)應(yīng)用企業(yè)(如物流企業(yè)、植保團(tuán)隊(duì)),實(shí)驗(yàn)室可通過測(cè)試風(fēng)墻 “預(yù)演" 實(shí)際作業(yè)場(chǎng)景的風(fēng)況 —— 例如測(cè)試物流無人機(jī)在城市 CBD 樓宇間的飛行穩(wěn)定性,無需反復(fù)進(jìn)行戶外試飛,避免因風(fēng)場(chǎng)問題導(dǎo)致的設(shè)備損壞與作業(yè)延誤,降低應(yīng)用端試錯(cuò)成本。
四、未來延伸:從實(shí)驗(yàn)室走向低空安全生態(tài)
隨著低空經(jīng)濟(jì)的深化,無人機(jī)測(cè)試風(fēng)墻的應(yīng)用已不止于實(shí)驗(yàn)室內(nèi)部,正逐步融入更廣闊的低空安全生態(tài)。在城市低空物流樞紐,風(fēng)墻可用于無人機(jī) “上崗前" 的定期抗風(fēng)檢測(cè);在農(nóng)業(yè)植保基地,可臨時(shí)搭建移動(dòng)測(cè)試風(fēng)墻,為植保無人機(jī)適配當(dāng)?shù)靥镩g風(fēng)況;在應(yīng)急救援演練現(xiàn)場(chǎng),還能模擬災(zāi)害區(qū)域(如臺(tái)風(fēng)、強(qiáng)風(fēng))的風(fēng)場(chǎng),幫助救援團(tuán)隊(duì)提前規(guī)劃無人機(jī)救援路徑。
未來,結(jié)合 AI 與數(shù)字孿生技術(shù),無人機(jī)測(cè)試風(fēng)墻還將實(shí)現(xiàn) “風(fēng)場(chǎng)預(yù)測(cè) - 模擬 - 優(yōu)化" 的智能化升級(jí):通過 AI 算法分析不同區(qū)域的歷史風(fēng)場(chǎng)數(shù)據(jù),自動(dòng)生成 “定制化風(fēng)場(chǎng)模擬方案";借助數(shù)字孿生技術(shù),將真實(shí)低空?qǐng)鼍埃ㄈ绯鞘薪謪^(qū)、山區(qū)地形)復(fù)刻到實(shí)驗(yàn)室,讓風(fēng)場(chǎng)模擬與實(shí)際環(huán)境實(shí)現(xiàn) “1:1 匹配",進(jìn)一步提升測(cè)試的精準(zhǔn)度。
從實(shí)驗(yàn)室里的 “風(fēng)境復(fù)刻者" 到低空安全的 “守護(hù)者",無人機(jī)測(cè)試風(fēng)墻正以技術(shù)實(shí)力為無人機(jī)安全飛行 “背書",也為低空經(jīng)濟(jì)的高質(zhì)量發(fā)展夯實(shí)基礎(chǔ) —— 只有每一臺(tái)無人機(jī)都經(jīng)得起復(fù)雜風(fēng)場(chǎng)的考驗(yàn),低空空間才能真正成為安全、高效的 “新經(jīng)濟(jì)賽道"。
